

 2026西湖龙井茶官网DTC发售:茶农直供,政府溯源防伪到农户家
2026西湖龙井茶官网DTC发售:茶农直供,政府溯源防伪到农户家
摘要
为解决现有三维感知技术存在的算法复杂度高、硬件成本昂贵以及实时性不足等瓶颈问题,本文创新性地提出了一种基于相机位移的轻量级三维物体属性识别方法。该方法采用时间切片聚焦策略,分析相机连续位移过程中像素变化的客观规律,并结合沿垂直铅垂线方向的动态区域分割策略,实现了对高凸、低凹和平面物体的快速识别与三维建模。其核心优势在于可与深度学习方法共享相机数据源和计算核心,同时支持分布式协同操作。与传统的基于深度学习的方法不同,所提方法无需对物体属性进行预训练,而是仅通过像素差异的递增、递减或偏移模式即可判定三维属性,显著降低了计算复杂度。实验结果表明,该方法在保持高识别准确率的同时,将计算延迟降低了约60%,可有效应用于盲人导航、移动机器人和自动驾驶等实时场景。此外,该方法还能同步解决镜像幻觉、水面反光等视觉欺骗问题,在保障数据可信度的同时,为智能感知系统提供了一条全新的技术路径。
主要贡献
- 提出了一种基于像素变化的三维物体特征识别方法,无需深度学习模型或物体属性训练,直接通过像素差异的递增/递减模式判断物体的凸、凹和平面特性;
- 设计了一种基于铅垂线方向的动态区域分割策略,可根据相机姿态(倾斜角度)实时调整左、中、右区域的划分比例,增强了方法的动态适应能力;
- 提出了一种分段聚焦方法,在相机连续位移过程中动态调整焦点位置,确保连续帧之间的可比性,提高像素变化计算的准确性;
- 系统分析了不同区域(左、中、右)与不同物体特征(凸、凹、平面)之间的像素偏移规律,并建立了像素变化与物体距离之间的定量关系;
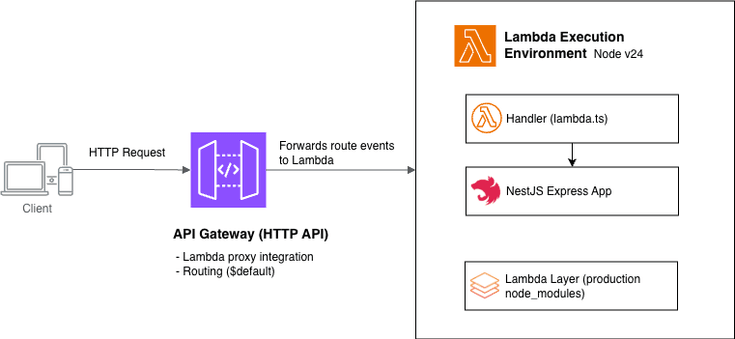
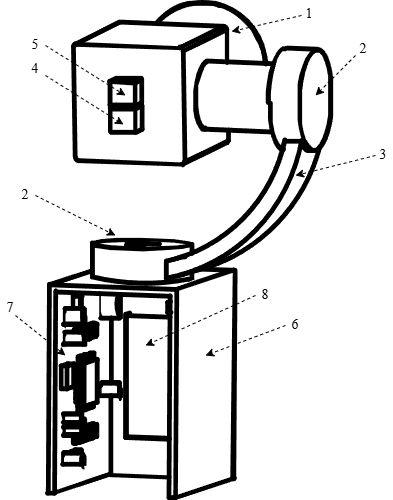
- 该方法可同步解决镜像幻觉、水面反光等视觉欺骗问题,为无人导航系统提供鲁棒的感知能力。 # 系统架构与核心原理 ## 2.1. 系统架构概述 所提出的图像采集与三维感知系统由硬件和算法两个主要子系统组成。整体架构如图1所示: 1 台相机、2 个旋转电机、3 双自由度旋转机构固件、4 重力传感器、5 陀螺仪、6 紧固件、7 集成控制中心、8 电源
免责声明:本文内容来自互联网,该文观点不代表本站观点。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容,请到页面底部单击反馈,一经查实,本站将立刻删除。